愛品網(wǎng) IPNO.CN
b2b免費(fèi)推廣平臺(tái)
掃掃有驚喜
愛品網(wǎng) IPNO.CN
b2b免費(fèi)推廣平臺(tái)
掃掃有驚喜

浙江AGV小車工作原理 |
||||||||||||||||||||
|
||||||||||||||||||||
agv小車驅(qū)動(dòng)方式是現(xiàn)代工業(yè)中比較常見的起重機(jī)零部件,是歐式起重機(jī)行走機(jī)構(gòu)的關(guān)鍵部件,是一種中高端的車輪組.
agv的導(dǎo)引是指根據(jù)AGV導(dǎo)向傳感器所得到的位置信息,按AGV的路徑所提供的目標(biāo)值計(jì)算出AGV的實(shí)際控制命令值,即給出AGV的設(shè)定速度和轉(zhuǎn)向角,這是AGV控制技術(shù)的關(guān)鍵.
當(dāng)接收到物料搬運(yùn)指令后,控制器系統(tǒng)就根據(jù)所存儲(chǔ)的運(yùn)行地圖和AGV小車當(dāng)前位置及行駛方向進(jìn)行計(jì)算,、規(guī)劃分析,選擇最佳的行駛路線,自動(dòng)控制AGV小車的行駛和轉(zhuǎn)向,當(dāng)AGV到達(dá)裝載貨物位置并準(zhǔn)確停位后,移載機(jī)構(gòu)動(dòng)作,完成裝貨過程.然后AGV小車起動(dòng),駛向目標(biāo)卸貨點(diǎn),準(zhǔn)確停位后,移載機(jī)構(gòu)動(dòng)作,完成卸貨過程,并向控制系統(tǒng)報(bào)告其位置和狀態(tài).隨之AGV小車起動(dòng),駛向待命區(qū)域.待接到新的指令后再作下一次搬運(yùn).
AGV的導(dǎo)引控制就是AGV軌跡跟蹤. AGV導(dǎo)引有多種方法,比如說利用導(dǎo)向傳感器的中心點(diǎn)作為參考點(diǎn),追蹤引導(dǎo)磁條上的虛擬點(diǎn)就是其中的一種.AGV的控制目標(biāo)就是通過檢測(cè)參考點(diǎn)與虛擬點(diǎn)的相對(duì)位置,修正驅(qū)動(dòng)輪的轉(zhuǎn)速以改變AGV的行進(jìn)方向,盡力讓參考點(diǎn)位于虛擬點(diǎn)的上方.這樣AGV就能始終跟蹤引導(dǎo)線運(yùn)行.

網(wǎng)站首頁(yè) | 付款方式 | 關(guān)于我們 | 信息刪除 | 聯(lián)系方式 | 服務(wù)條款 | 版權(quán)隱私 | 網(wǎng)站地圖 | 專題 | 排名推廣 | 廣告服務(wù) | 積分換禮 | 網(wǎng)站留言 | RSS訂閱 | 鄂ICP備14015623號(hào)-2
愛品網(wǎng)是一個(gè)開放的平臺(tái),,信息全部為用戶自行注冊(cè)發(fā)布!并不代表本網(wǎng)贊同其觀點(diǎn)或證實(shí)其內(nèi)容的真實(shí)性,,需用戶自行承擔(dān)信息的真實(shí)性,,圖片及其他資源的版權(quán)責(zé)任! 本站不承擔(dān)此類作品侵權(quán)行為的直接責(zé)任及連帶責(zé)任。
如若本網(wǎng)有任何內(nèi)容侵犯您的權(quán)益,,請(qǐng)聯(lián)系: [email protected]
?2012-2021愛品網(wǎng) 免費(fèi)信息發(fā)布平臺(tái),,免費(fèi)推廣平臺(tái),免費(fèi)B2B網(wǎng)站愛品網(wǎng) 10dcg.com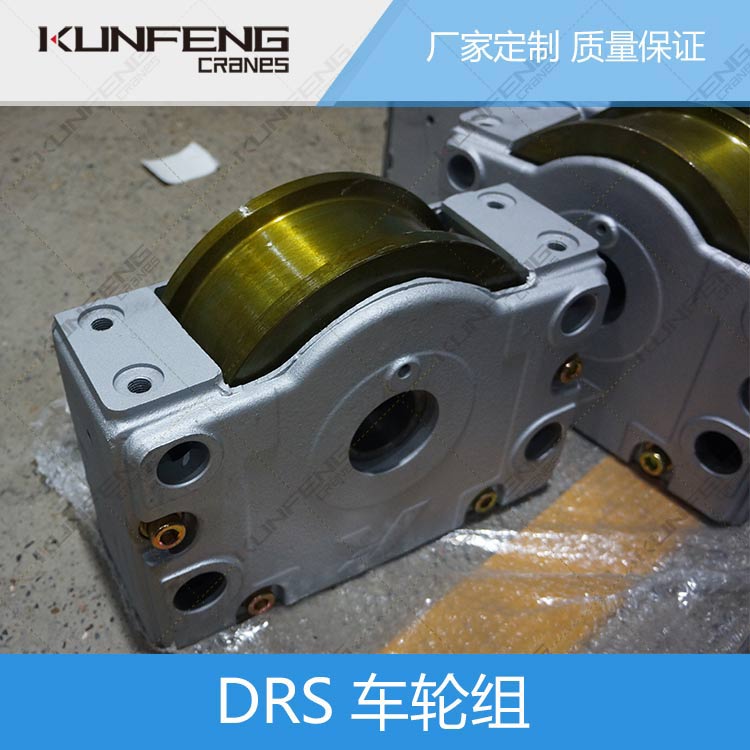








名認(rèn)證")
證")
認(rèn)證")
證")